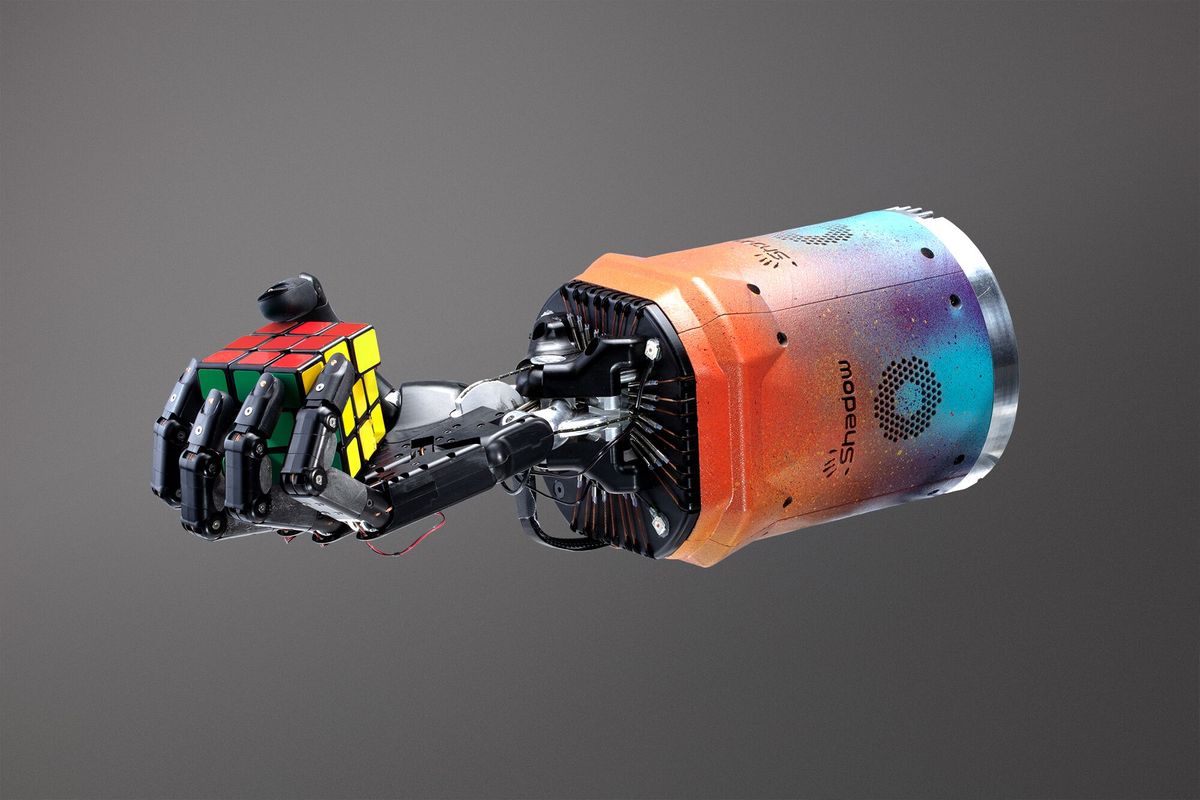
인공지능 연구 단체인 ‘오픈AI’은 범용, 자율학습 로봇을 개발하기 위한 새로운 단계에 도달했다. 이 단체의 로봇 부서는 작년에 처음 개발된 휴머노이드 로봇 손인 닥틸(Dactyl)이 루빅 큐브를 한 손으로 푸는 법을 배웠다고 발표했다. 오픈AI는 이 업적을 로봇 기술과과 자체 AI 소프트웨어 기술의 도약으로 보고 있다. 이 소프트웨어는 닥틸이 극복해야 할 실제적이고 물리적인 과제를 제시하기 전에 가상 시뮬레이션을 사용하여 새로운 과제를 시작할 수 있게 한다.
닥틸의 새로운 재능을 보여주는 데모 비디오에서, 우리는 로봇 손이 서투르지만 정확한 조작으로 큐브를 풀이해 나가는 것을 볼 수 있는데, 비록 많은 시간이 걸리긴 했지만 결국 퍼즐을 푸는 데 성공했다. 사람이 큐브를 푸는 날렵한 손놀림과 속도와 비교하면 다소 불안하지만 오픈AI의 업적은 AI와 로봇 산업의 광범위한 목표인 훈련과 프로그래밍이 필요 없이 스스로 배우고 작업을 수행하는 법을 배울 수 있는 로봇에 한 걸음 더 가까이 다가섰다는 데 의미가 있다.
오픈 AI의 연구자 피터 웰린더는 “오픈AI에 있는 로봇팀은 다른 회사와 목표하는 방향이 다르다. 우리는 범용 로봇을 만들려고 하고 있다. 인간의 손이 다양한 일을 하는 것처럼 우리는 그와 같은 범위에서 더 일반적인 역할을 수행하는 로봇을 만들려고 하고 있다”라고 연구 방향을 밝혔다.
2016년 반도체 업체인 인피니온이 초인적인 속도로 루빅 큐브를 풀 수 있는 로봇을 개발했고, 로봇은 1초도 안되는 시간에 큐브를 풀었다. 그것은 당시 5초 미만의 세계 기록을 깼다. 2년 후, MIT가 개발한 기계가 0.4초도 안 되는 시간에 큐브를 풀었다. 2018년 말 일본 유튜브 채널 휴먼컨트롤러(Human Controller)는 프로그램 가능한 서보 모터에 부착된 3D 프린팅 코어를 이용해 자체 개발한 루빅 큐브까지 개발했다.
실제 큐브가 주어졌을 때, 닥틸은 스스로 문제를 해결했으며, 지금까지 주어진 적 없는 다양한 조건 아래서 역할을 수행했다. 예를 들면 한 손으로 글러브를 낀다거나 두 개의 손가락을 테이프로 묶고 큐브를 풀었다. 연구원들은 다른 물체로 찌르고, 모페티 같은 종잇 조각으로 거품을 만드는 등 역할을 수행하는 행동을 지속적으로 방해했다. 업계 선두 주자인 보스턴 다이나믹스가 개발한 휴머노이드나 개와 같은 로봇처럼 세계에서 가장 발달한 로봇도 자율적으로 작동할 수 없으며, 기본적인 행동까지도 수행하기 위해서는 광범위한 작업별 프로그래밍과 같은 인간의 개입이 필요하기에 오픈AI의 기술과 작업이 중요한 실정.
오픈AI는 로봇의 행동을 통제하는 명확한 프로그램 없어도 스스로 수동 노동이나 가사 업무를 수행하고 인간과 함께 일할 수 있는 로봇의 종류을 만들기 위한 작지만 필수적인 단계를 차근차근 밟아가고 있다고 밝혔다. 오픈AI의 현재를 직접 확인해 보자.



